Я не имею ничего больше, что можно добавить.
Понятное дело, что монтаж, танец тщательно запрограммирован и т.п. Но!
Я не имею ничего больше, что можно добавить.
Понятное дело, что монтаж, танец тщательно запрограммирован и т.п. Но!
В будущем фраза “нет ума – строй дома” очень быстро потеряет актуальность. Неквалифицированные кадры будут не нужны.
Стены активно возводятся строительными 3D-принтерами, а внутренняя отделка скоро будет в руках таких товарищей роботов.
Такие вот новости с рынка недвижимости.
Продолжаются эксперименты MIT над мелким “Гепардом”. Мне особенно понравился слоу-моушн с запрыгиванием на стол.
Ещё забавно смотрится упражнение pronk (не знаю, как это перевести на русский).
Скоро уже будут бегать по улицам!
Вот тут японцы придумали интересную технологию. Хотя, нет. Технология старая. Они придумали, как затолкать всё добро в маленький и мобильный девайс!
Мне очень нравится!
Вот, очередное состязание роботов-берменов. Ещё немного и в пабах будет засилье железяк. :-)
Как много историй о том, что роботы отбирают работу у людей всё в большем и большем объеме… И вот ещё одна. Причем в области, которая совсем даже не казалась находящейся в опасности роботизации.
Знакомьтесь: новый робот-каскадёр!
Особенно радуют первые секунды ролика с тем, с чего начинали: с бревна и изучения, как оно летает.
Эдакое суровое моделирование и прототипирование! :-)
Ну, что же! Это, конечно, заняло больше, чем один вечер (два вечера ![]() ), но я это сделал!
), но я это сделал!
Итак: эмулятор компьютера Радио 86РК, работающий на базе ESP-01 (ESP8266). Почти все запчасти весьма несложно находятся в закромах (у меня самой большой проблемой было найти дохлую материнку для выпайки оттуда miniDIN). Как вариант – всю рассыпуху можно заказать за недорого на AliExpress или локально (пересылка будет стоить дороже, чем комплектуха :-) ).
Оригинальный компьютер прошел мимо меня (я тогда был ещё мелкий совсем), но я смог добраться до него в более взрослом возрасте (в школе стояло несколько подобных простеньких машин в кабинете информатики). На них же я получил свой первый опыт программирования на языке Бейсик.
И такими небольшими шагами будут внедрять в массовое создание светлый и недостижимый образ прекрасных роботов. Сначала займутся самыми падкими и верующими…

;-)
Внезапно выяснилось, что не только я интересуюсь старыми игрушками и игровыми приставками (казалось бы, кому это вообще нужно). По многочисленным просьбам делаю более подробный обзор внутренностей NESPi Case.
Итак, внутренности!
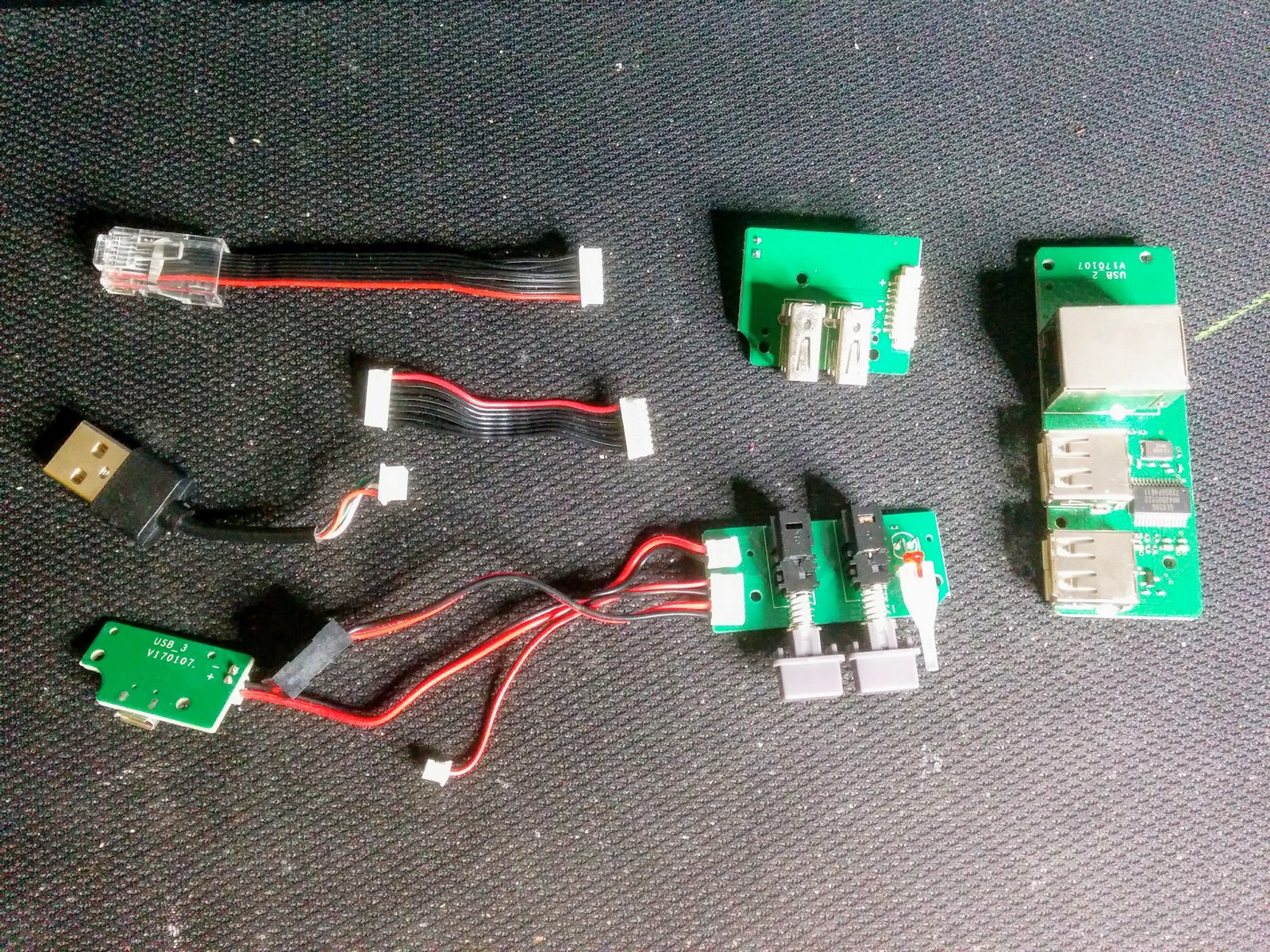
Внутри корпуса компактно размещены 4 дополнительные платки, на которых смонтированы разъемы внешнего питания, разъем подключения Ethernet, четыре гнезда USB с USB-хабом, плата с кнопками включения питания с прилагаемой светодиодной индикацией включения и кнопка reset, которой так не хватает всем стандартным корпусам Raspberry Pi.
Всё как-то руки не доходили, чтобы завершить сборку своей ретро игровой консоли. То забывал заказать, то забывал, что вообще хотел сделать себе приставку для ностальгирования… В общем, полоса забвения – завершена и на руках теперь красивый и законченный девайс!
Вот эти ребята из Retroflag – придумали, а китайцы – сделали и продают активно. Вот здесь, на сайте Retroflag можно почитать что это такое и закупить там же то же можно (правда за цены не узнавал).
Сделано весьма качественно и удобно. Собирается в финальный вариант за 20 минут.
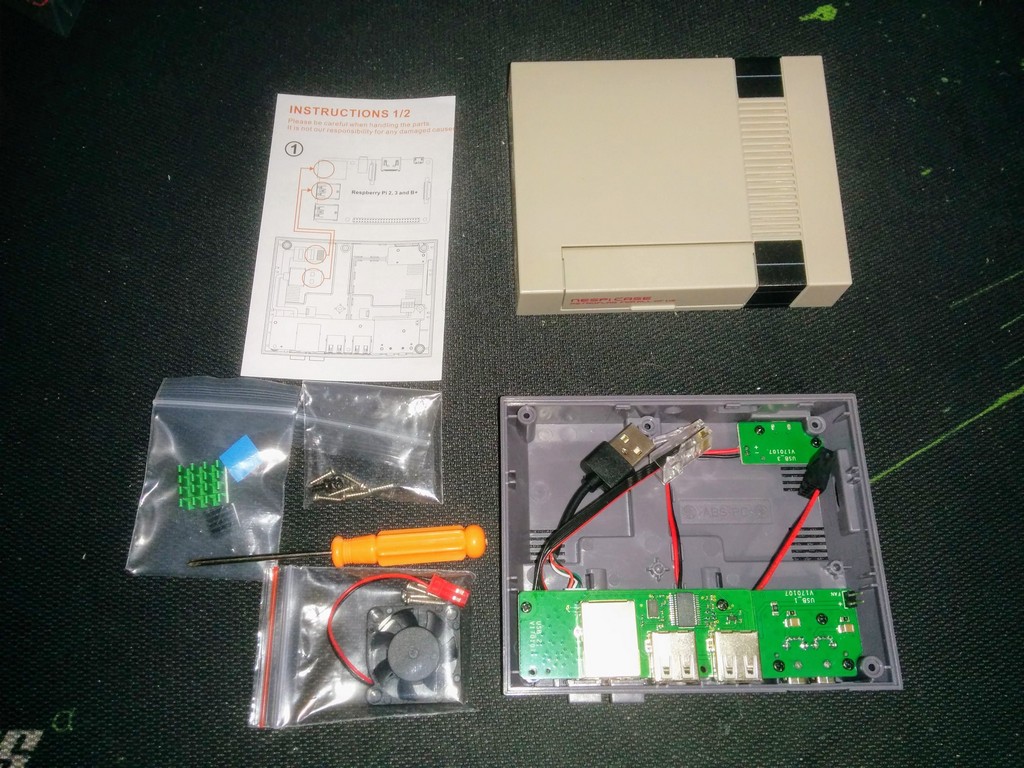

Всё добротно сделано. Собирается без напильника и какой-то там матери. Даже в комплекте есть мелкая отвертка для странных китайских шурупчиков, которые стандартными отвертками плохо крутятся (какие-то странные шлицы).